
来源:财经报道网
2026-06-25 09:46:18
(原标题:飞捷科思打造全新一代物理世界模型 Fysiverse,实现从“视觉生成”到“物理推演”的飞跃)
世界模型进入“从渲染到模拟”的分水岭
随着具身智能、人形机器人和自动驾驶加速走向现实环境,世界模型正成为连接感知、预测与决策的关键物理AI基础设施。它不仅要回答“世界看起来是什么样”,还要回答“采取一个行动后,世界会发生什么变化”。
在近期关于世界模型的讨论中,李飞飞与 World Labs 团队从功能上将其划分为渲染器、模拟器和规划器:渲染器生成观测,模拟器推演状态,规划器输出动作。三者并非彼此割裂,但模拟器提供了几何、物理和动力学层面的结构性骨架,是连接视觉呈现与行动后果的关键枢纽。
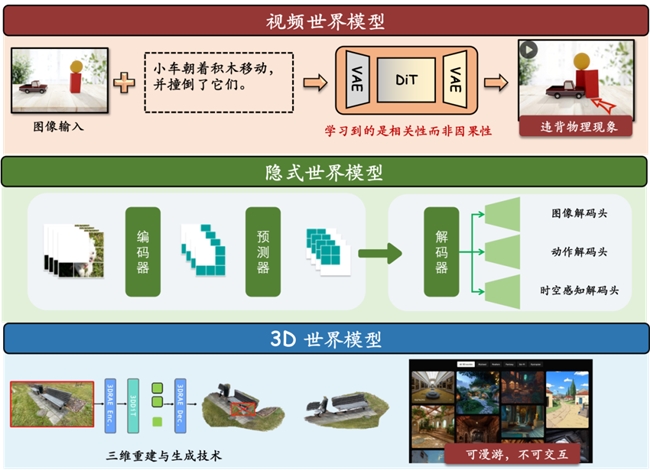
回看当前主流技术路线,视频生成世界模型路线擅长视觉呈现,却可能在碰撞、穿透、形变和长时运动中出现物理漂移;隐式世界模型能够在紧凑表征中预测未来,但物理机制往往被压缩在难以检查的潜在空间;3D 世界模型补足了空间结构,却不等同于具备真实的材料、接触和动力学属性。
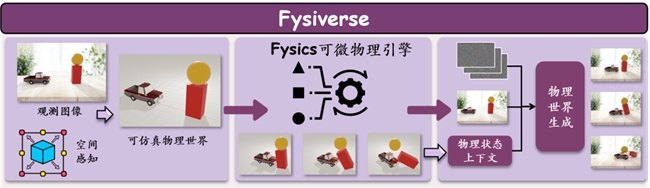
以Fysics 可微分物理引擎为底座,飞捷科思开辟了全新的世界模型技术路线,有效解决了当前数据驱动的世界模型普遍面临的“物理幻觉、推理失效、非标场景崩坏”等问题,进而打造出创新的遵循真实世界物理规律的全新一代物理世界模型Fysiverse。Fysiverse 的颠覆式创新在于提出了一条“显式物理模拟器 × 生成式渲染器”的系统路径:以可计算的物理状态作为中间层,以可微分物理引擎作为世界演化机制,以渲染器作为视觉表达层。它不是为世界模型外挂运动轨迹,而是将世界模型的计算链路重构为“观测—状态—物理演化—视觉呈现”。
步骤 1:让观测进入可计算的物理世界
Fysiverse 首先解决的是“世界状态从哪里来”。系统针对场景观测进行解耦,分离前景物体与背景上下文,恢复物体的三维几何,并补全可用于接触、遮挡和碰撞计算的空间结构。原本停留在二维画面中的各种球体、积木、桌面或柔性物体,由此被还原为一个能够参与物理计算的三维场景。在此基础上,Fysiverse 结合材料先验与视觉线索,对物体的物质类型和可供仿真使用的物理属性进行理解。例如,表面的光泽、粗糙度与纹理,可以为摩擦和接触行为提供判断依据;刚体、软体、流体和颗粒等不同物质形态用统一的求解框架完成解算。
这一步让模型不只识别“画面里有什么”,还进一步建立“它由什么材质构成、会如何受力、与其他物体接触后将怎样变化”的可计算描述。
步骤 2:以可微分物理引擎构建因果推演中枢
完成世界状态重建后,Fysiverse 依托飞捷科思自研的 Fysics 可微分物理引擎,对场景中的运动与交互进行显式推演。Fysics 在系统中不是外置的后处理工具,而是决定世界“应该怎样发生”的因果中枢。通过统一物理求解框架,Fysics 覆盖刚体、软体、流体和颗粒等多种物质形态,并处理它们之间的耦合交互。系统由此能够从小球滚动、积木倒塌等基础运动,延伸至柔性形变、流体飞溅、颗粒堆积和多材料接触等更复杂的动态过程。
物理真实性往往最容易在接触瞬间露出破绽。针对碰撞、摩擦、支撑和受力传递等关键环节,Fysics 为 Fysiverse 提供了清晰的物理边界,大大减少物体穿透、无故消失、碰撞响应错误或能量不守恒等常见“物理幻觉”。
更重要的是,可微分设计让物理计算不只给出“结果是什么”,还能够把物理误差和运动偏差转化为可优化信号,为模型提供“哪里不对、应当如何调整”的反馈。这使显式模拟与生成模型之间形成可学习的闭环,也为后续的机器人策略优化、参数反演和任务反馈提供基础。
步骤 3:让生成模型渲染“正确发生”的世界
过去不少物理增强的视频生成方法,主要将运动轨迹作为控制条件。轨迹能够描述物体大致去向,却难以完整表达物体边界、空间层次、前后遮挡、接触区域和形变过程。
Fysiverse 从物理仿真的动态状态中提取几何、运动、遮挡与接触等结构化信息,形成面向视频生成模型的多模态物理条件。生成模型不再凭借像素统计独自“猜测下一帧”,而是在明确的物理推演结果上完成视觉呈现。
由此,Fysiverse 将物理一致性从生成结果的外部评价标准,前移为生成过程中的内生约束:模拟器负责给出可信的世界演化,渲染器负责把这一演化转化为具有真实感和时间连贯性的画面。两者协同,使系统兼顾物理可信度与视觉表现力。
案例一|多米诺骨牌效应推演
相比其他世界模型容易出现柜体同时倾倒、无接触翻转、悬浮飞散或形态失真,无法建立清晰的受力传递链等问题,Fysiverse 则完整呈现“首个柜体倾倒—发生接触—力量逐级传递—其余柜体依次落地”的过程,碰撞时序与运动结果更符合真实物理规律。

输入提示词:Four cabinets are on the ground, and the first cabinet on the left falls to the right, causing the others to fall as well.地上放着四个柜子,最左边的那个向右倒下,结果把其他的柜子也带倒了。

Fysiverse 与前沿世界模型生成结果对比
案例二|软体玩偶受力推演
相比其他世界模型方法难以同时保持主体一致性与重力轨迹,容易出现玩偶突然站立、异常变形、放大、消失或运动方向失控等物理幻觉现象,Fysiverse 能够让玩偶沿右上方向弹起,并在重力作用下自然回落,形态、姿态和空间位置保持连续,软体运动更加自然可信。

输入提示词:A teddy bear bounces upward toward the right direction, then falls naturally due to gravity.一只泰迪熊向右上方弹起,随后在重力作用下自然下落,整个过程流畅且逼真。

Fysiverse 与前沿世界模型生成结果对比
案例三|兔形水团流体推演
相比其他世界模型方法常将水团错误地表现为刚性物体,落地后仍保持兔形,或直接生成无关物体、泛化水花和静态水面,缺少从坠落、撞击到飞溅铺展的因果连续性等物理不真实问题,Fysiverse 则自然呈现水团受重力下落、触地破形、向外飞溅并逐渐铺展的完整过程,流体形态变化与运动响应更贴近真实世界。

输入提示词:A rabbit-shaped water ball falls due to gravity and splashes water.一簇兔子形状的水团在重力作用下坠落并飞溅开来,整个过程流畅自然。

Fysiverse 与前沿世界模型生成结果对比
面向物理AI时代,飞捷科思持续构建可交互的物理智能基础设施
对于具身智能而言,高清画面并不是终点。机器人真正需要的是能够准确预测行动后果的世界模型:杯子受力后会不会倾倒,物体碰撞后将向何处移动,柔性材料被抓取时会如何形变,容器中的流体怎样晃动,重心如何偏移。只有当这些变化在因果上可信,世界模型才可能成为训练、规划和验证的一部分。
Fysiverse 的价值,正是在视觉生成与物理模拟之间建立了一条完整链路:从二维观测到三维状态重建,从材料属性理解到多物理材质物体的运动,再到物理约束的世界生成。其目标不是生成一段“会动的视频”,而是构建一个能够按物理定律演化、可计算、可控制、可优化的动态世界。
飞捷科思认为,下一代世界模型的竞争,将从画面质量的竞争进一步走向世界状态与因果推演能力的竞争。Fysiverse 所代表的全新范式,是让生成模型继续发挥视觉表达优势,同时以显式物理模拟补足其因果建模短板,从而推动世界模型从“像真实世界”迈向“能够服务真实世界”。
在即将于7月17日至20日在上海举行的 2026 世界人工智能大会(WAIC 2026)期间,飞捷科思将进一步展示 Fysiverse 的技术细节、关键能力与典型场景。面向未来,公司将持续推进 Fysics 与 Fysiverse 的协同演进,为具身智能、人形机器人、智能驾驶和智能制造等领域提供更加可信、可解释、可交互的物理智能基础设施。
本文来源:财经报道网

财经报道网
2026-06-25
财经报道网
2026-06-25
财经报道网
2026-06-25
财经报道网
2026-06-25
财经报道网
2026-06-25
财经报道网
2026-06-25
证券之星资讯
2026-06-25
证券之星资讯
2026-06-25
证券之星资讯
2026-06-25



